PEPS:Passive-Entry-Passive-Start
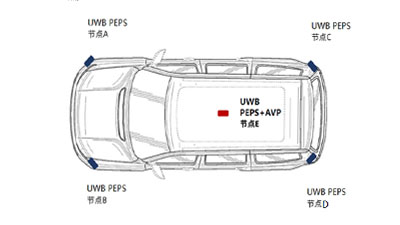
汽車上的PEPS指的是智能進入及啟動系統(tǒng),也叫無鑰匙系統(tǒng)、智能鑰匙。
當車主走近車輛一定距離時,門鎖會自動打開并解除防盜
;當車主離開車輛時
,門鎖會自動鎖上并進入防盜狀態(tài)并且記錄所有的服務和診斷信息
,記住對空調(diào)和資訊娛樂的設置
。
")
")
場景需求:
用腳劃一下車底 ,后備箱開
。風險:易摔倒
;場景需求:基于PEPS
")
對于這個場景應用,首先要實現(xiàn)基于UWB信號和定位算法,實現(xiàn)智能車鑰匙在Trunk Area的準確辨別,避免誤判;其次需要利用后視的Camera的視頻分析,實現(xiàn)用戶行為準確判斷,比如用戶需要面對后備箱幾秒鐘,才實現(xiàn)后備箱打開動作。
UWB+視頻的場景應用
UWB辨別和捕捉準確區(qū)域和目標,視頻協(xié)助捕捉目標的場景,實現(xiàn)自動化控制操作。只有UWB和視頻結(jié)合使用,才能實現(xiàn)準確無誤的動作。首先通過UWB實現(xiàn)準確目標在特定區(qū)域的準確判斷,第二步利用視頻實現(xiàn)場景過濾,準確判斷出正確場景,實現(xiàn)自動控制。(單靠一種技術(shù),無法實現(xiàn)功能落地)
AVP自主泊車輔助系統(tǒng)
AVP是真正意義上的全自動駕駛。車輛可以自行進入完全陌生的停車場,無需先學習就可以完成所有停車動作,不要求駕駛員在車內(nèi);最終目標是取代傳統(tǒng)的人工停車服務,幫助用戶節(jié)省大量停車時間,解決高峰時段排隊停車的痛點。
AVP作為目前停車場景的功能天花板,涉及細分場景復雜 ,技術(shù)難度大,保障車輛安全也是一個極大的挑戰(zhàn)
。作為L4級別的智能駕駛
,對硬件和軟件的要求都很高,尤其是算法和安全性
。
詳情可至微信公眾號“巨視安防”了解。