

到達(dá)角度AOA / 到達(dá)相差PDOA

AOA(Angle of Arrival)/PDOA(Phase Difference of Arrival)通過計(jì)算信號(hào)到達(dá)不同位置接收天線的相位差值來計(jì)算信號(hào)的接收方向從而確定其相對(duì)于自身的朝向。
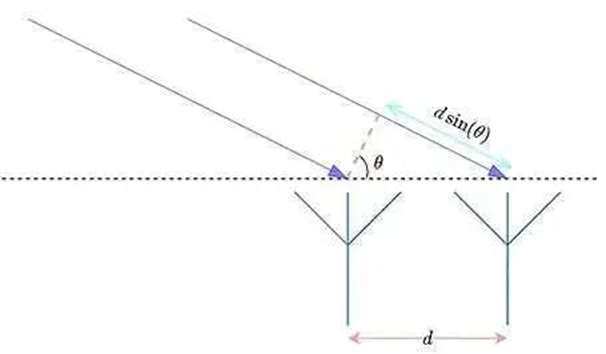
Angle of Arrival – general case

到天線A的路徑比到天線B的路徑大p=d.sin(θ)。如果假設(shè)信號(hào)在自由空間中傳播,不受阻礙或經(jīng)過變換,那么信號(hào)傳播到天線A所需的時(shí)間將更長(zhǎng)。為了計(jì)算入射角,可以找到每個(gè)天線的到達(dá)時(shí)間,以及用于估計(jì)p和θ的差值。
PDOA advantage over TDOA
UWB系統(tǒng)中,到達(dá)角度(AOA)可以通過經(jīng)由不同天線接收到的信號(hào)之間的相位差的估計(jì)來間接地進(jìn)行估計(jì)。這個(gè)基于相位差的估計(jì)來估計(jì)AOA的計(jì)數(shù)就叫做PDOA(Phase Difference of Arrival)。相比其他方案,PDoA可以提供了更高的角度精度。
考慮45 度的方位角,即θ=π/4 ,代入前文的公式(assuming the optimum antenna distance d = 2.3cm),可以得到兩根天線的到達(dá)時(shí)間差(TDOA)為:

這么小的數(shù)值已經(jīng)遠(yuǎn)遠(yuǎn)超出了基帶接收機(jī)的時(shí)間測(cè)量精度范圍了 PDOA 的基本原理是將到達(dá)角度θ轉(zhuǎn)換為到達(dá)相位差 無線電信號(hào)到達(dá)天線a的時(shí)間比到達(dá)天線B的時(shí)間稍晚 Receivers Antenna Separation 脈沖響應(yīng)的相位差α和入射角θ之間的關(guān)系 綠色部分的坡度為3,而紅色部分的坡度為0.6 注:如果天線輻射單元之間的間距d大于λ/2,則每個(gè)相位關(guān)系都有多個(gè)可能的入射角解,因此存在歧義。 Decawave的實(shí)驗(yàn)表明,使用略小于λ/2的天線間距可以提高報(bào)告的角度精度 Experimental Results 使用信道5上2.08cm (anchor)(錨)的天線間距報(bào)告的典型到達(dá)角與實(shí)際到達(dá)角 當(dāng)標(biāo)簽天線和錨天線處于相同高度且具有相同的天線極化時(shí) 角度誤差來源: 1:標(biāo)記錨定高度:-如果標(biāo)記和錨定不在同一平面上 · 隨著高度的增加 · 隨著高度增量的變化 2:標(biāo)簽錨定極化:-如果標(biāo)簽和錨定天線陣列的天線極化不同 § 俯仰(如標(biāo)簽天線傾斜wrt至錨) § 滾動(dòng)(如將天線正面貼在錨上 § 偏航(如標(biāo)簽天線旋轉(zhuǎn)垂直軸wrt至錨定) 挑戰(zhàn)性高的系統(tǒng)約束是由于標(biāo)簽錨天線極化差異導(dǎo)致的PDOA變化。迄今為止 Decawave使用定制設(shè)計(jì)的標(biāo)簽大小的圓形極化天線和線性極化錨陣列的初步結(jié)果給出了以下結(jié)果: · 俯仰:在整個(gè)180oAOA范圍內(nèi),從無標(biāo)記俯仰到錨定天線的60o標(biāo)記俯仰wrt · 滾動(dòng):在整個(gè)180oAOA范圍內(nèi),從無標(biāo)簽滾動(dòng)到錨定天線的90o標(biāo)簽滾動(dòng)wrt,AOA精度為±30o · 偏航:在整個(gè)180oAOA范圍內(nèi) 注:在實(shí)踐中,由于標(biāo)簽的相對(duì)方向 最優(yōu)天線間隔λ/2: PDOA要求兩根天線靠得非常近—理想的情況是兩根接收天線的間隔為波長(zhǎng)的一半,即λ/2 最優(yōu)天線間隔是指在不產(chǎn)生相位模糊的前提下使得到達(dá)相位差較大化的間隔 當(dāng)天線間隔小于最優(yōu)間隔時(shí), 的線性部分的斜率變小了,這意味著相比最優(yōu)天線間隔時(shí)估計(jì)精度有損失。 當(dāng)天線間隔大于最優(yōu)間隔時(shí), 的線性部分的斜率更大,但是存在相位模糊現(xiàn)象 詳情可至微信公眾號(hào)“巨視安防”了解
公眾號(hào) 掃碼咨詢
交換機(jī):18017588179(孫經(jīng)理) 無人機(jī):13311882358(孫總)![]()
![]() 的放大倍數(shù)越大
的放大倍數(shù)越大








上海市閔行區(qū)中春路4999號(hào)莘莊商務(wù)樓1326室

service@covond.com

www.jxetj.com
