,需解決語義到物理動作的精準(zhǔn)映射。
2. 倫理與標(biāo)準(zhǔn)化
l需建立統(tǒng)一技術(shù)路線與行業(yè)標(biāo)準(zhǔn),避免重復(fù)投入與生態(tài)碎片化。
3. 商業(yè)化落地
l當(dāng)前人形機(jī)器人仍處早期,應(yīng)用效率低于人類,需突破成本與性能瓶頸。
總結(jié)
具身智能正從實(shí)驗(yàn)室走向產(chǎn)業(yè),其發(fā)展依賴跨學(xué)科技術(shù)突破與開源生態(tài)共建。中國在硬件制造與場景資源上具備優(yōu)勢,但需解決核心算法、數(shù)據(jù)閉環(huán)與商業(yè)化路徑問題。未來十年或成為繼智能手機(jī)后的萬億級市場。

空天具身智能
空天具身智能(Aerospace Embodied Intelligence)旨在賦能無人機(jī)、衛(wèi)星等空天平臺實(shí)現(xiàn)自主感知、認(rèn)知、行動端到端閉環(huán),具備以自我為中心主動與人類和環(huán)境交互的能力。空天具身大模型是實(shí)現(xiàn)無人機(jī)自主智能的有效手段,也是通往空天具身智能的必經(jīng)之路。構(gòu)造無人機(jī)智能體數(shù)據(jù)集主要存在以下幾個挑戰(zhàn):
無人機(jī)具身任務(wù)缺乏統(tǒng)一定義:無人機(jī)智能體需要在場景隨機(jī)和環(huán)境局部可觀測條件下理解四維時(shí)空的內(nèi)在關(guān)聯(lián)并做出準(zhǔn)確的行動 ,涉及感知
、認(rèn)知、規(guī)劃
、決策等多個層面
。任務(wù)多樣且相互耦合,導(dǎo)致空天智能體的任務(wù)定義至今仍不清晰
。
無人機(jī)3D數(shù)據(jù)采集難:采集戶外環(huán)境3D數(shù)據(jù)需要無人機(jī)等設(shè)備 ,門檻較高,并且戶外3D數(shù)據(jù)采集需要專業(yè)人員操控?zé)o人機(jī)在更廣的范圍中采集更多的點(diǎn)云數(shù)據(jù)
。
無人機(jī)具身數(shù)據(jù)標(biāo)注成本高:無人機(jī)智能體的動作空間多 ,需要對標(biāo)注人員進(jìn)行長期的培訓(xùn)才能完成對無人機(jī)智能體的熟練標(biāo)注。

空天具身智能領(lǐng)域的應(yīng)用主要包括以下方面:
無人機(jī)自主導(dǎo)航與控制:提高無人機(jī)在復(fù)雜城市環(huán)境中的自主導(dǎo)航 、避障和任務(wù)執(zhí)行能力
。
衛(wèi)星遙感與智能解析:空天具身智能技術(shù)可應(yīng)用于衛(wèi)星遙感圖像的智能解析,提高衛(wèi)星對地觀測數(shù)據(jù)的處理和分析能力 。
空中交通管理:利用無人機(jī)具身智能技術(shù) ,實(shí)現(xiàn)空中交通的自主管理
,提高空中交通系統(tǒng)的安全性和效率。
災(zāi)害監(jiān)測與救援:無人機(jī)智能體可應(yīng)用于災(zāi)害現(xiàn)場的快速偵查、監(jiān)測和救援任務(wù),提高救援效率。
城市規(guī)劃與管理:通過無人機(jī)智能體收集的城市空間數(shù)據(jù),為城市規(guī)劃、建設(shè)和管理工作提供有力支持。
環(huán)境保護(hù)與監(jiān)測:利用無人機(jī)智能體對環(huán)境進(jìn)行實(shí)時(shí)監(jiān)測,及時(shí)發(fā)現(xiàn)和處理環(huán)境污染問題。
軍事領(lǐng)域:空天具身智能技術(shù)可應(yīng)用于軍事偵察、目標(biāo)識別、戰(zhàn)場態(tài)勢感知等方面,提高軍事作戰(zhàn)能力
SkyAgent-Models:空天智能體模型
空天具身場景感知:二維視覺語言模型的視覺模型僅能接收圖片,無法接收環(huán)境特征,因此在測試該任務(wù)時(shí)對二維視覺語言模型進(jìn)行調(diào)整,將輸入改為無人機(jī)位置前后左右所拍攝的四張圖片,通過描述圖片的prompt生成各自的caption之后,對四個caption進(jìn)行拼接,得到輸出的環(huán)境觀察信息。
空天具身空間推理:該任務(wù)同樣需要輸入三維特征,因此在測試該任務(wù)時(shí)對二維視覺語言模型進(jìn)行調(diào)整
,將輸入改為無人機(jī)位置正前方的觀察圖像與問題,通過對該圖像進(jìn)行推理問答,得到空間推理答案。
空天具身導(dǎo)航探索:將輸入改為無人機(jī)飛行路徑上的幾張圖片和問題,通過生成各自圖像的caption之后,根據(jù)拼接后的caption回答問題,最終得到無人機(jī)導(dǎo)航探索的答案。
空天具身任務(wù)規(guī)劃:首先通過對終點(diǎn)圖片生成caption并設(shè)計(jì)問題,即詢問無人機(jī)智能體怎么到達(dá)該地點(diǎn)。然后,依據(jù)拼接后的飛行路徑圖片caption進(jìn)行解答,得到無人機(jī)路徑規(guī)劃的答案。

易和聯(lián)航&具身智能體AIBOX

公司愿景:
以通信、定位、導(dǎo)航、識別
、控制(
CLNRC)五大智能體核心能力為技術(shù)底座,通過具身智能理論構(gòu)建智能體物理存在與數(shù)字認(rèn)知的深度融合,讓智能系統(tǒng)不僅擁有環(huán)境感知的大腦
,更具備與環(huán)境共融的"身體"
。結(jié)合
人工智能與自動駕駛技術(shù)的深度耦合,打造具有物理具身性
、環(huán)境交互性和認(rèn)知涌現(xiàn)性的跨設(shè)備(無人機(jī)/機(jī)械臂/機(jī)器狗/無人艇)、跨介質(zhì)(陸地/空中/水域)
、跨場景的自主決策系統(tǒng)
,致力于成為
無人化垂直場景的智能基礎(chǔ)設(shè)施構(gòu)建者。
讓智能體突破人類操作的物理邊疆
通過構(gòu)建空間智能時(shí)代的具身智能載體:"手"(機(jī)械臂)、"足"(機(jī)器狗)、"翼"(無人機(jī))、"鰭"(無人艇),我們正在重新定義生產(chǎn)力工具的邊界。每個智能體通過多模態(tài)傳感器形成"數(shù)字軀體",在真實(shí)物理環(huán)境中實(shí)現(xiàn)感知-決策-執(zhí)行的具身閉環(huán),讓危險(xiǎn)場景無人值守,讓精密操作無限重復(fù),讓人類專注更具創(chuàng)造力的價(jià)值領(lǐng)域。
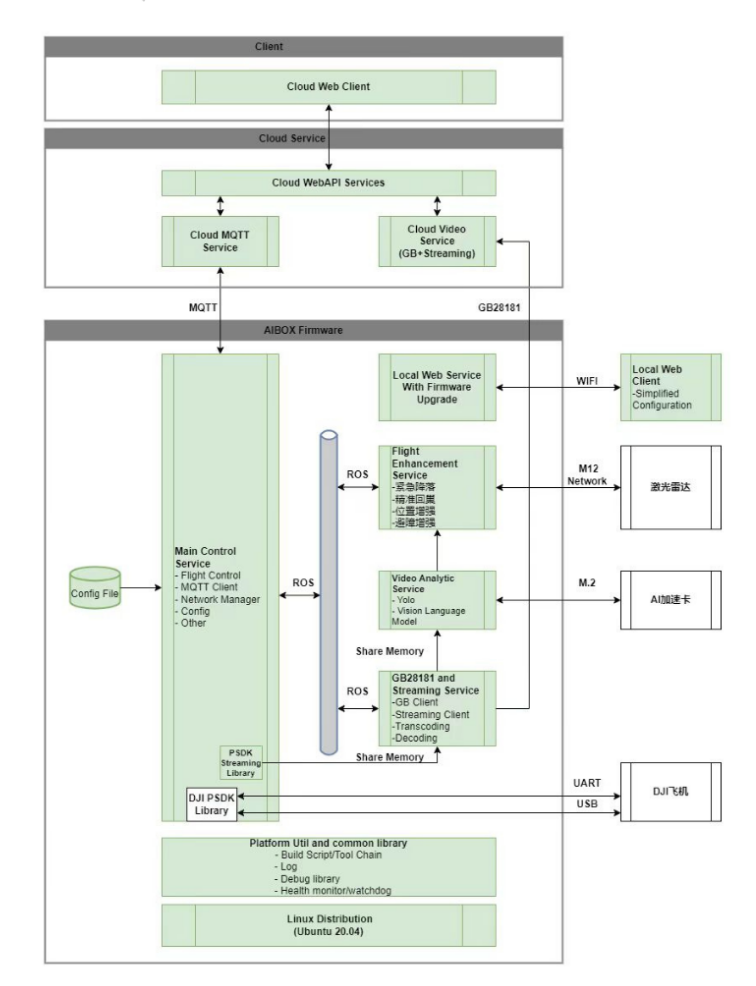
核心技術(shù)與產(chǎn)品布局
公司聚焦定位、導(dǎo)航、邊緣視覺大模型等核心技術(shù),推出AiBox系列產(chǎn)品,涵蓋通信增強(qiáng)、安全增強(qiáng)、算力增強(qiáng)等功能,滿足不同無人化場景需求。